DOI: http://dx.doi.org/10.35381/s.v.v3i6.306
Prótesis antropomórfica multifuncional para pacientes
con deformaciones en la mano
Multifunctional
anthropomorphic prosthesis for patients with deformations in the hand
Edison Patricio Salazar Cueva
Universidad Técnica de Cotopaxi
Ecuador
https://orcid.org/0000-0003-4395-0164
Angel Guillermo Hidalgo Oñate
Universidad Técnica de Cotopaxi
Ecuador
https://orcid.org/0000-0002-2804-7930
Tania Karina Berrazueta
Espin
tania.berrazueta5166@utc.edu.ec
Universidad Técnica de Cotopaxi
Ecuador
https://orcid.org/0000-0001-7120-5327
Jorge David Freire
Samaniego
Universidad Técnica de Cotopaxi
Ecuador
https://orcid.org/0000-0003-0379-8225
Benjamín Belisario Chavez Rios
Benjamin.chavez0374@utc.edu.ec
Universidad Técnica de Cotopaxi
Ecuador
https://orcid.org/0000-0003-4395-0164
Recibido: 23 de abril 2019
Aprobado: 30 de mayo del 2019
RESUMEN
La deformación de las extremidades
en los infantes es una problemática latente que no discrimina. Por tanto, en
este trabajo de investigación se describe el diseño de una prótesis
multifuncional que consiga un equilibrio entre la satisfacción del usuario y un
costo de inversión reducido. Mediante la técnica de escaneo en triangulación se
obtiene el modelo de la mano, que constituye la base para el desarrollo físico
del dispositivo. Teniendo en cuenta los criterios de diseño que requiere el
paciente (movimiento, flexión, estética), se ha incorporado un prototipo que
cumple con el antropomorfismo (tanto en apariencia estática como dinámica);
bajo peso; bajo consumo de energía (para una mayor duración de la batería
incorporada); modularidad (para asegurar menores costos y fácil mantenimiento)
y funcionalidad (para que tenga un desempeño adecuado). Adicional, se presenta
un análisis del impacto social, económico y técnico que esta propuesta
contribuye.
Descriptores: Deformación de mano; Prótesis
pediátrica; Modelado 3D.
SUMMARY
The deformation of the extremities
in infants is a latent problem that does not discriminate. Therefore, this
research paper describes the design of a multifunctional prosthesis that
achieves a balance between user satisfaction and a reduced investment cost. By
means of the triangulation scanning technique, the hand model is obtained,
which forms the basis for the physical development of the device. Taking into
account the design criteria required by the patient (movement, bending,
aesthetics), a prototype that complies with the anthropomorphism (both static
and dynamic) has been incorporated; under weight; low
power consumption (for longer battery life); modularity (to ensure lower costs
and easy maintenance) and functionality (so that it has an adequate performance).
Additionally, an analysis of the social, economic and technical impact that
this proposal contributes is presented.
Descriptors: Hand deformation; Pediatric
prosthesis; 3d modeling.
INTRODUCCIÓN
Dentro de los problemas de salud que
agobian al ser humano se encuentra el desarrollo de anomalías congénitas, como
es el desarrollo de deformaciones [1]. Una deformidad es conocida también como
malformación y se la identifica en una parte del cuerpo u órgano, por su
diferencia al compararla con la forma promedio que debería tener [2,3]. Por lo
general se forman en el recién nacido (el 3% a nivel mundial, ya nace con una)
y se van desarrollando a lo largo de su vida [4]. Se presentan con mayor
frecuencia en las extremidades inferiores, cuando el niño se encuentra en el
proceso de aprendizaje al caminar y en las extremidades superiores en la
sujeción de objetos [5]. Las deformidades de la mano varían de intensidad, una
menor puede ser una desproporción en el dedo y una severa, la carencia total de
huesos y músculos [6,7].
También se debe considerar
deformaciones crónicas, como es el caso de una amputación, la cual consiste en
la pérdida de una extremidad y se suele causar por enfermedades vasculares,
traumatismos, tumores, entre otras [8]. La amputación es una condición médica
que resulta luego del tratamiento fallido para eliminar una patología, mas no producto de la patología como tal [9]. Además del
problema físico que se produce para la persona, se debe adicionar el trauma
psicológico y emocional que puede producirse, ya que podría generar un rechazo
o discriminación social, además de una disminución de su autoestima [10-13].
Cuando un infante posee una deformidad o amputación parcial o total de su mano,
se recomienda acuda a un especialista quien podrá brindarle asesoría sobre una
cirugía reconstructiva o la incorporación de prótesis [14,15]. Ya que como se
puede evidenciar en [16], utilizar un dispositivo artificial en una edad
temprana es muy relevante, para su desarrollo mental, ya que existen efectos
psicológicos asociados en los infantes.
En la búsqueda de mejorar la calidad
de vida de los pacientes, la influencia que presenta la tecnología en la
medicina es cada vez mayor, dado que la viabilidad de la implementación de
prótesis biónicas ha incrementado gracias a la inserción de materiales y
mecanismos más sofisticados. Como base para este estudio se presenta el estudio
realizado en [17], donde se elabora una prótesis de mano utilizando silicona
como materia prima. En este prototipo personalizado se utilizaron alambres
flexibles modificados para proporcionar un movimiento interfalángico
pasivo. Este dispositivo fue probado en un paciente masculino que presentó una
mejora emocional por la apariencia de su mano, comodidad y una mayor facilidad
para desarrollar sus actividades cotidianas. Por su parte, en el proyecto de
investigación de [18], se describe el diseño de una prótesis sensorizada confiable y de fácil uso, que sostiene
resultados a futuro. La mano se construye en base a un mecanismo de transmisión
que implementa una actuación semindependiente de la
abducción/aducción del pulgar y de la flexión/extensión del índice, por medio
de un solo actuador. La versión actual de esta prótesis se sometió a pruebas de
durabilidad y una evaluación preclínica que involucró a un amputado transradial.
Por tanto, este artículo se organiza
de la siguiente manera: la introducción en la sección 1, en la sección 2 se
muestra la metodología utilizada. En la sección 3 se presenta el estudio de
caso y en la sección 4 el diseño del prototipo. El impacto producido y las
conclusiones se describen en las secciones 5 y 6 respectivamente.
Metodología
Antropometría de la mano
Para realizar este análisis se han
tomado las medidas de la mano derecha de 6 infantes de entre 4 y 6 años. Para
obtener la medición del ancho de la palma, se determina la longitud entre la
parte inferior y exterior a la altura de los nudillos. También se tiene que el
largo de la palma, es la distancia en dirección perpendicular entre el nudillo
del dedo anular y la muñeca. Además de tomarse en cuenta el grosor de la palma
y los valores mínimos y máximos del largo de cada uno de los dedos, como se
describe en la Tabla 1.
Movimientos articulares
La mano de un ser humano posee
distintas articulaciones, que a su vez poseen distintos movimientos y sus
respectivas limitaciones. La articulación trapezometacarpiana
se encuentra entre la palma y el dedo pulgar y sus límites de movimiento de
extensión y abducción son de 90° y 70° respectivamente. (Figura 1) [6]. De
forma similar la articulación metacarpofalángica del
pulgar, posee 50° y 0° como límites de los movimientos de flexión y extensión
respectivamente. Al tratarse de los demás dedos (del índice al meñique), los
límites son 90° para realizar el movimiento de flexión, 45° para extensión y
20° para abducción. Adicional se tiene que las articulaciones interfalángicas poseen entre 90° y 100° para flexión y
entre 0° y 20° para extensión. En el caso de los movimientos coordinados que la
persona requiere son: el agarre cilíndrico, de gancho, de palma y de lado.
Mediante estos movimientos básicos, la prótesis le permite al paciente realizar
independientemente las acciones de abducción del pulgar y tanto flexión como
extensión de todos los dedos de su mano.
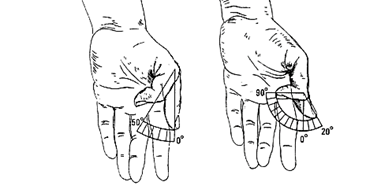
Figura. 1. Grados de flexión de las falanges
del pulgar.
Tabla 1. Medidas del largo y ancho de los dedos.
|
Dedo |
Tamaño mínimo [mm] |
Tamaño mínimo [mm] |
|
Pulgar |
31.7 |
42.1 |
|
Índice |
46.1 |
59.8 |
|
Medio |
54.9 |
68.0 |
|
Anular |
47.6 |
60.8 |
|
Meñique |
38.3 |
48.8 |
Estudio de Caso
Una niña de 4 años de edad, que fue
remitida de un centro de rehabilitación corporal de la ciudad de Latacunga,
Ecuador. Dicha paciente presenta una deformación en el
falange proximal y falange distal del dedo pulgar de su mano derecha, como se
puede apreciar en la Figura 2. Dicha malformación ha estado presente en la
persona durante toda su vida, pero al pasar los años se ha ido incrementando,
lo cual actualmente representa motivo de incomodidad y recelo ante su familia y
sociedad en general. La evaluación de la extremidad demuestra que no posee la
misma fuerza muscular de su mano izquierda, el rango de movimiento y la
capacidad sensorial se encuentra sesgados, lo cual dificulta el desarrollo de
sus actividades cotidianas. Al realizar la escala analógica visual (VAS por sus
siglas en inglés) la cual permite medir la intensidad del dolor con la máxima
reproductibilidad entre los observadores, se obtuvo un valor de 2/10 (mínimo
dolor). Siendo la expectativa del paciente llegar a tener una extremidad con
una mejor estética y funcionalidad.

Figura. 2. Medición de
la longitud de los dedos de la mano de la paciente.
Diseño del prototipo
Escáner 3D sin contacto
Las técnicas activas suelen ser más
precisas que las pasivas, además que son las apropiadas para el escaneo en
distancia corta; para este caso se ha seleccionado el escaneo de triangulación.
En el desarrollo de esta técnica se emite luz láser para establecer la forma y
posición de un objeto, mediante una cámara se localiza la traza laser
proyectada sobre dicho objeto. Es así que el emisor laser, la cámara y la traza
proyectada sobre el objeto establecen un triángulo, como se aprecia en la
Figura 3. Para las pruebas de escaneo se utiliza un dispositivo scanner 3D sense, cuyas principales características se presentan en la
Tabla 2.
Modelado 3D
Para realizar el diseño del
prototipo en 3D, las partes que conforman la prótesis han sido modeladas
utilizando el software CAD SolidWorks. De esta forma
además de modelar piezas, se puede extraer los planos respectivos que permiten
obtener información relevante para el proceso de producción. Se trata de
plasmar la idea que un especialista aporta sobre la anatomía de las
extremidades superiores por medio del diseño CAD en la virtualización de la
prótesis. Para realizar una extremidad con un mayor realismo se tomó en cuenta
los movimientos, grados de acción y la retracción que deben cumplir cada uno de
los dedos.
Tabla 2. Características técnicas del
dispositivo escáner utilizado.
|
Ítem |
Detalle |
|
Sistemas operativos compatibles |
Windows 8 o posterior |
|
Volumen Para Escaneo |
Min: 0.2m x 0.2m x 0.2m |
|
Máximo: 2m x 2m x 2m |
|
|
Rango de operación |
Min: 0.2m |
|
Máximo: 1.6m |
|
|
Tamaño de la imagen Profundidad |
640 (ancho) x 480 (alto) pixeles |
|
Tamaño de la imagen en color (resolución del color) |
1920 (ancho) |
|
|
1080 (alto) pixeles |
|
Campo de visión |
Horizontal: 45 ° |
|
Vertical: 57.5 ° |
|
|
Rendimiento máximo de la imagen |
30 fps (cuadros por
segundo) |
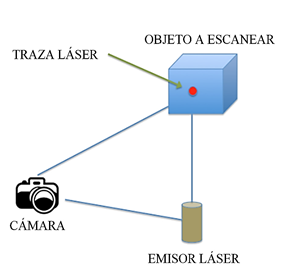
Fig. 3. Estructura de un escáner de
triangulación.
En el diseño mecánico se ha
contemplado el conjunto de eslabones, que integra varias piezas, como se
muestra en la Figura 4; así como los accionamientos que deben producirse con la
inserción de tensores, que son emulados mediante hilo nylon. Además, se
incorpora secciones de hilo elástico que permiten realizar la extensión de las
falanges y los dedos; así se consigue los movimientos de extensión, retracción
y sujeción de objetos. En la Figura 5 se muestra el diseño de la mano, que está
lista para el proceso de impresión.
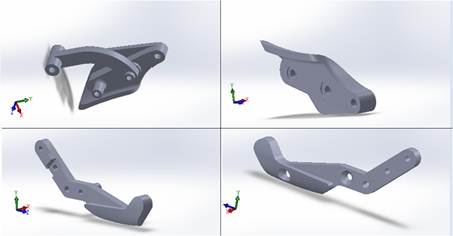
Fig. 4. Diseño mecánico del conjunto de
eslabones.
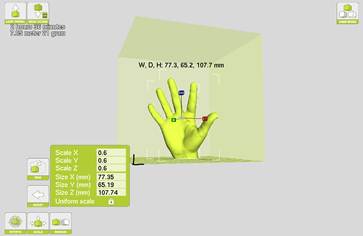
Fig. 5. Diseño final del prototipo.
Impresión 3D
Se importa el diseño y se carga en
el software Cura, el cual se encarga de trasladar la imagen a un conjunto de
coordenadas en los planos X, Y y Z. Dichas
coordenadas son convertidas a lenguaje de programación abierto (denominados
códigos G) y con esto se consigue localizar el origen de los ejes. Utilizando
una impresora 3D PrintrBot Simple, se utiliza como
materia prima el plástico PLA en diversas capas superpuestas, con un espesor
aproximado de 0.2 mm. El cabezal se va desplazando
varias veces sobre los 3 ejes, hasta obtener el objeto solido modelado. En la
Figura 6 se muestra el proceso de impresión de la prótesis diseñada. Las
principales características de la impresora utilizada se describen en la Tabla
3.
Tabla 3. Características técnicas de la
impresora 3D.
|
Ítem |
Detalle |
|
Volumen de construcción X-Y-Z |
150 mm x 150 mm x 150 mm |
|
Resolución de impresión |
50 micrones |
|
Velocidad de impresión |
80 mm / s max recomendado |
|
Filamento |
1.75mm PLA y ABS (con cama de calentamiento) |
|
Extrusora |
Extrusora de Aluminio (accionamiento directo) y
boquilla extrusora de 0.4 mm |
|
Cama de impresión |
Temperatura ambiente y máxima de 80°C |
|
Electrónica |
Printrbot Rev F Printrboard con conexión
micro-USB y ranura para tarjeta micro SD. |
|
Software |
Printrbot no posee
software propietario, pero recomienda Cura (Disponible para descarga
gratuita). |

Figura. 6. Proceso de
impresión de la prótesis pediátrica.
Programa de control
La programación que se encarga del
movimiento de la prótesis está basada en el lenguaje de código abierto de Arduino. A través de comandos se realiza el cambio de
posición de los servomotores que necesitan una señal digital para cambiar sus
estados; siendo dirigido por las señales analógicas obtenidos por los sensores
y un acondicionamiento de análogo a digital requerido. Mediante el movimiento
sincronizado de los servomotores colocados en cada uno de los dedos de la
prótesis se consigue realizar las tareas planteadas en el paciente.
Análisis del impacto
En la Figura 7 se muestra a la
paciente recibiendo las indicaciones de uso de la prótesis y una inducción a
sus familiares sobre el diseño realizado, los materiales y contraindicaciones
que se deben tener en cuenta. A continuación, se describen los beneficios en
los ámbitos social, técnico y económico que se han definido con esta propuesta
implementada.

Figura. 7.
Presentación del prototipo final a la paciente y a sus familiares.
Social
A la par de los beneficios
ergonómicos obtenidos, se facilita el desarrollo de las actividades cotidianas
de la infanta, lo cual contribuye en su inclusión social. Dentro del núcleo
familiar también se considera un factor importante, pues se le brinda la oportunidad
de poder compartir con sus seres sin ningún tipo de recelo. Además,
considerando que la paciente está inmersa en los ciclos iniciales que
representan la base de su formación académica es importante que se sienta
incluida en las actividades con normalidad y se evite que sea objeto de
discriminación, pues una discapacidad física no influencia en su potencial
intelectual y psicológico.
Técnico
El proceso de escaneo e impresión 3D
establece la base para el conocimiento relacionado a la biomecánica y
bioingeniería con la concepción de diseños mecánicos de una manera
simplificada. Se reduce el tiempo utilizado para digitalizar objetos o seres
vivos, con lo cual se pueden establecer diseños que busquen cubrir parcial o
totalmente las necesidades personales de los usuarios. Mediante el concepto de
escalabilidad se pueden determinar materiales y componentes de bajo costo, lo
cual facilita el rediseño, mejoras y la producción comercial a gran escala, con
la opción a productos personalizados también.
A la par de los beneficios
ergonómicos obtenidos, se facilita el desarrollo de las actividades cotidianas
de la infanta, lo cual contribuye en su inclusión social, académica y familiar.
Económico
Al poder trabajar con materiales de
bajo costo, se contribuye a que el precio final para el paciente sea reducido
de forma similar, lo cual en contraste con una prótesis importada o de diseño
industrial representa una menor inversión.
Uno de los objetivos planteados en
este proyecto es el desarrollo de este producto con búsqueda de financiamiento
gubernamental y así poder a través de políticas de Estado entregarlo a personas
de bajos recursos económicos que no pueden acceder a dispositivos tecnológicos
de primer nivel.
Conclusiones y Trabajo Futuro
En el presente trabajo se ha
descrito brevemente el proceso de diseño de una prótesis ortopédica que será
utiliza por una infanta, la cual participa como el estudio de caso.
A la par de los beneficios
ergonómicos obtenidos, se facilita el desarrollo de las actividades cotidianas
de la infanta, lo cual contribuye en su inclusión social. Dentro del núcleo
familiar también se considera un factor importante, pues se le brinda la
oportunidad de poder compartir con sus seres sin ningún tipo de recelo. Además,
considerando que la paciente está inmersa en los ciclos iniciales que
representan la base de su formación académica es importante que se sienta
incluida en las actividades con normalidad y se evite que sea objeto de
discriminación, pues una discapacidad física no influencia en su potencial
intelectual y psicológico; que es la beneficiaria directa de esta prótesis;
además se abre las puertas para diversos
tipos de prótesis que se puedan ejecutar mediante lineamientos similares a los
de la prótesis ergonómica de pulgar para el desarrollo de prótesis mediante el
escaneo e impresión 3D, en vista de que la tecnología de este tipo ayudara a
nuevos proyectos con mayores grados de complejidad tal sería el caso de una
persona que carezca parcial o totalmente de una de sus extremidades superiores.
REFERENCIAS
CONSULTADAS
1.
Kubiak, P., Siczek,
K., Dąbrowski, A., y Szosland,
A. (2016). Nuevo método de alta precisión para determinar la velocidad de
choque del vehículo según las mediciones de la deformación del cuerpo. Revista internacional
de resistencia a los choques, 21 (6), 532-541.
2.
Wang, J., Zeng, Z., Weinberger, C. R., Zhang, Z., Zhu, T. y Mao, S.
X. (2015). Observación
in situ a escala atómica de la deformación dominada por el hermanamiento en
tungsteno cúbico centrado en el cuerpo a nanoescala.
Materiales de la naturaleza, 14 (6), 594.
3.
Hu, X., Maiti, R., Boadi, J., Li, W., Carré, M. J., Lewis, R., ... y
Matcher, S. J. (2016, marzo). Elastografía de coherencia óptica
para estudios de deformación cutánea humana con almohadillas. En Elastografía Óptica y Biomecánica de Tejidos III (Vol.
9710, p. 97100C). Sociedad Internacional de Óptica y Fotónica.
4.
Hellmund, A., Berg, C., Geipel, A., Müller, A., y Gembruch,
U. (2016). Diagnóstico
prenatal de la secuencia de deformación de la acinesia fetal (FADS): un estudio
de 79 casos consecutivos. Archivos de ginecología y obstetricia, 294 (4),
697-707.
5.
Graham
Jr, J. M., y Sanchez-Lara,
P. A. (2015). Los patrones reconocibles de Smith de la deformación humana. Elsevier ciencias de la salud.
6.
Sugiura, Y., Nakamura,
F., Kawai, W., Kikuchi, T.,
y Sugimoto, M. (2017, septiembre). Detrás de la
palma: reconocimiento de gestos con la mano mediante la medición de la
deformación de la piel en el dorso de la mano mediante sensores ópticos. En
2017 56ª Conferencia Anual de la Sociedad de Ingenieros de Instrumentación y
Control de Japón (SICE) (pp. 1082-1087). IEEE.
7. Peña-Pitarch, E., Magaña, J. F. P., Ticó-Falguera,
N., Al Omar, A., Larrión, I. A., y Costa, J. V.
(2019, julio). Mano humana virtual: agarre y deformación de la punta de los
dedos. En Conferencia Internacional sobre Factores Humanos Aplicados y
Ergonomía (pp. 484-492). Springer, Cham.
8.
Imbinto, I., Peccia,
C., Controzzi, M., Cutti,
A. G., Davalli, A., Sacchetti,
R., y Cipriani, C. (2016). Tratamiento de la
amputación parcial de manos: una perspectiva de ingeniería. Revisiones del IEEE
en ingeniería biomédica, 9, 32-48.
9.
Alvial, P., Bravo, G., Bustos, M. P.,
Moreno, G., Alfaro, R., Cancino, R., y Zagal, J. C.
(2018). Evaluación funcional cuantitativa de una prótesis embebida en silicona
impresa en 3D para amputación parcial de la mano: reporte de un caso. Diario de
terapia de manos, 31 (1), 129-136.
10.
D’Anna, E., Petrini,
F. M., Artoni, F., Popovic,
I., Simanić, I., Raspopovic,
S., y Micera, S. (2017). Una prótesis de mano
bidireccional somatotópica con estimulación nerviosa
eléctrica transcutánea basada en retroalimentación
sensorial. Informes científicos, 7 (1), 10930.
11. Controzzi, M., Clemente, F., Barone, D., Ghionzoli, A., y Cipriani, C. (2016). La SSSA-MyHand:
una prótesis de mano mioeléctrica liviana y diestra. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 25
(5), 459-468.
12. Calderón, C. A.,
Ramírez, C., Barros, V., y Punin, G. (2017). Diseño y
despliegue del sistema de control de agarre aplicado a prótesis de mano
robóticas. IEEE Latin America Transactions, 15 (2), 181-188.
13. Light, C. M., & Chappell, P. H. (2000). Desarrollo de una
prótesis manual de ejes múltiples, ligera y adaptable. Ingeniería médica y física, 22
(10), 679-684.
14. M., Peck, J., Srivastava, R., Katsavelis, D., y Carson, A. (2016). Una prótesis de mano
transicional impresa en 3D de código abierto para niños. JPO: Revista de Prótesis
y Ortesis, 28 (3), 103-108.
15.
Martinot-Lagarde, C., Quintero-Prigent, N., Brennetot, N., Chapuy, M., Fiat, M., Fahmy, M.,
y Fitoussi, F. (2016). Últimas tendencias en prótesis
de extremidades superiores para niños con agenesia. Anales de medicina física y
rehabilitación, 59, e11.
16.
Ayats, M., y Suárez, R. (2017). Diseño de
una prótesis de mano adaptable al crecimiento. Actas de las XXXVIII Jornadas de
Automática.
17. Nayak, S., Lenka, P. K., Equebal, A., y Biswas, A. (2016). Prótesis de mano de silicona a medida:
Un estudio de caso. Cirugía de la mano y rehabilitación, 35 (4),
299-303.
18.
Controzzi, M., Clemente, F., Barone, D., Luciani, L. B., Pierotti, N., Bacchereti, M., y Cipriani, C. (2018, octubre). Progreso hacia el desarrollo
de la prótesis de mano DeTOP: una prótesis transradial sensorizada para uso
clínico. En Conferencia Internacional sobre Rehabilitación Neuro
(pp. 103-106). Springer, Cham.
REFERENCES
CONSULTED
1. Kubiak, P., Siczek, K., Dąbrowski, A., & Szosland, A.
(2016). New high
precision method for determining vehicle crash velocity based on measurements
of body deformation. International journal of crashworthiness, 21(6), 532-541.
2. Wang, J., Zeng,
Z., Weinberger, C. R., Zhang, Z., Zhu, T., & Mao, S. X. (2015). In situ
atomic-scale observation of twinning-dominated deformation in nanoscale body-centred cubic
tungsten. Nature materials, 14(6), 594.
3. Hu, X., Maiti,
R., Boadi, J., Li, W., Carré,
M. J., Lewis, R., ... & Matcher, S. J. (2016,
March). Optical coherence elastography for human
finger-pad skin deformation studies. In Optical Elastography
and Tissue Biomechanics III (Vol. 9710, p. 97100C). International Society for
Optics and Photonics.
4. Hellmund, A., Berg, C., Geipel,
A., Müller, A., & Gembruch, U. (2016). Prenatal
diagnosis of fetal akinesia deformation sequence
(FADS): a study of 79 consecutive cases. Archives of gynecology and obstetrics,
294(4), 697-707.
5. Graham Jr,
J. M., & Sanchez-Lara, P. A. (2015). Smith's recognizable patterns of
human deformation. Elsevier Health Sciences.
6. Sugiura, Y., Nakamura, F., Kawai, W.,
Kikuchi, T., & Sugimoto, M. (2017, September). Behind the palm: Hand
gesture recognition through measuring skin deformation on back of hand by using
optical sensors. In 2017 56th Annual Conference of the Society of Instrument
and Control Engineers of Japan (SICE) (pp. 1082-1087). IEEE.
7. Peña-Pitarch,
E., Magaña, J. F. P., Ticó-Falguera, N., Al Omar, A.,
Larrión, I. A., & Costa, J. V. (2019, July). Virtual Human Hand: Grasps and Fingertip Deformation.
In International Conference on Applied Human Factors and Ergonomics (pp.
484-492). Springer, Cham.
8. Imbinto, I., Peccia,
C., Controzzi, M., Cutti,
A. G., Davalli, A., Sacchetti,
R., & Cipriani, C. (2016). Treatment of the
partial hand amputation: an engineering perspective. IEEE reviews in biomedical
engineering, 9, 32-48.
9. Alvial, P., Bravo, G., Bustos, M. P.,
Moreno, G., Alfaro, R., Cancino, R., & Zagal, J.
C. (2018). Quantitative
functional evaluation of a 3D–printed silicone-embedded prosthesis for partial
hand amputation: A case report. Journal of Hand Therapy, 31(1), 129-136.
10. D’Anna, E., Petrini,
F. M., Artoni, F., Popovic,
I., Simanić, I., Raspopovic,
S., & Micera, S. (2017). A somatotopic
bidirectional hand prosthesis with transcutaneous electrical nerve stimulation
based sensory feedback. Scientific reports, 7(1), 10930.
11. Controzzi, M., Clemente, F., Barone, D., Ghionzoli, A., & Cipriani, C. (2016). The SSSA-MyHand:
a dexterous lightweight myoelectric hand prosthesis.
IEEE Transactions on Neural Systems and Rehabilitation Engineering, 25(5),
459-468.
12. Calderon, C. A., Ramirez,
C., Barros, V., & Punin, G. (2017). Design and Deployment of Grasp
Control System applied to robotic hand prosthesis. IEEE Latin America
Transactions, 15(2), 181-188.
13. Light, C. M., & Chappell, P. H.
(2000). Development of a lightweight and adaptable multiple-axis hand
prosthesis. Medical engineering & physics, 22(10), 679-684.
14. M., Peck, J., Srivastava,
R., Katsavelis, D., & Carson, A. (2016). An open source 3D-printed transitional hand prosthesis for
children. JPO: Journal of Prosthetics and Orthotics, 28(3), 103-108.
15. Martinot-Lagarde, C., Quintero-Prigent,
N., Brennetot, N., Chapuy,
M., Fiat, M., Fahmy, M., & Fitoussi,
F. (2016). Latest trends in upper limb prothesis for
children with agenesia. Annals of physical and
rehabilitation medicine, 59, e11.
16. Ayats, M., & Suárez, R. (2017).
Diseño de una prótesis de mano adaptable al crecimiento. Actas de las
XXXVIII Jornadas de Automática.
17. Nayak, S., Lenka,
P. K., Equebal, A., & Biswas,
A. (2016). Custom-made silicone hand prosthesis: A case study. Hand Surgery and
Rehabilitation, 35(4), 299-303.
18. Controzzi, M., Clemente, F., Barone, D., Luciani, L. B., Pierotti, N., Bacchereti, M.,
& Cipriani, C. (2018, October). Progress Towards the Development of the DeTOP
Hand Prosthesis: A Sensorized Transradial
Prosthesis for Clinical Use. In International Conference on NeuroRehabilitation (pp. 103-106). Springer, Cham.
©2019 por los autores. Este artículo es de acceso abierto
y distribuido según los términos y condiciones de la licencia Creative Commons
Atribución-NoComercial-CompartirIgual
4.0 Internacional (CC BY-NC-SA 4.0)
(https://creativecommons.org/licenses/by-nc-sa/4.0/).